Jetson NX 操作文档
nomachine控制nx:
mac:192.168.2.99 nx: 192.168.2.32
username: a password:123456
一 关于转台控制:
1. 转台控制协议
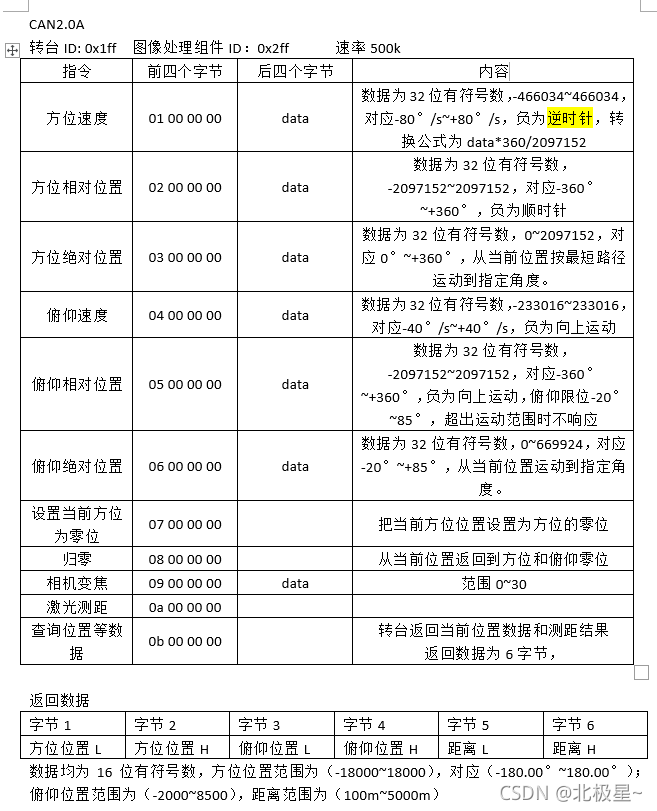
2. 转台控制
转台控制代码文件 1_CAN_Send.py
文件路径:~/Desktop/CAN_Control
控制命令:
sudo python3 ./1_CAN_Send.py <command> <data>
-
转台协议中的指令代号,十进制,1 ~ 11;
-
转台协议中的内容, 十进制,如果不需要内容,则随便输入数据占位即可。
例如:
sudo python3 ./1_CAN_Send.py 10 0 #测距
sudo python3 ./1_CAN_Send.py 2 90 #方位角顺时针转90度
注意:
-
尽量不使用转台的俯仰速度,俯仰限位-20~80 到达限位后可能会断开CNA指令接收。
-
返回值为
{‘Azimuth_Angle’:location,‘Pitch_Angle’:updown,‘Distance’:distance}方位角 俯仰角 测距返回的距离
返回值可能会有延迟,可以发送命令后通过
查询指令
sudo python3 ./1_CAN_Send.py 11 0 确认
- 如果需要电十字配合
python3 ./0_Cross_Check.py(文件路径 ~/Desktop/CAN_Control)
二 关于视觉部分
- 启动监听
文件路径:/home/a/USB_CAN/USB_CAN_Test2/UDP_python/
文件: server.py
控制命令: python3 ./server.py 开启监听,收到工作指令后启动深度学习部分
输出已经重定向到文件 /home/a/USB_CAN/USB_CAN_Test2/Check/4_test_yolov5.txt
其他可能用到的命令:
jtop 查看Jetson设备温度以及内存占用等信息。