Xavier入门教程软件篇-源码安装autoware1.13.0
环境 xavier4.2.3
安装 autoware1.13.0
安装系统依赖:
$ sudo apt-get update
$ sudo apt-get install -y python-catkin-pkg python-rosdep ros-$ROS_DISTRO-catkin
$ sudo apt-get install -y python3-pip python3-colcon-common-extensions python3-setuptools python3-vcstool
$ pip3 install -U setuptools
下载源码:
$ mkdir -p autoware.ai/src
$ cd autoware.ai
wget -O autoware.ai.repos "https://gitlab.com/autowarefoundation/autoware.ai/autoware/raw/1.13.0/autoware.ai.repos?inline=false"
更改mrt_cmake_modules使用master版本,修改后如下:
url: https://github.com/KIT-MRT/mrt_cmake_modules.git
version: master
下载源码
$ vcs import src < autoware.ai.repos
安装autoware依赖
$ rosdep update
$ rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
编译支持cuda
$ AUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
下载demo包
$ mkdir ~/autoware.ai/demo
$ cd ~/autoware.ai/demo
$ wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_data.tar.gz
$ wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_150324.tar.gz
解压复制到特定位置:
$ cd ~
$ mkdir .autoware
$ cd .autoware
$ cp ~/~/autoware.ai/demo/sample_moriyama_* .
$ tar zxfv sample_moriyama_150324.tar.gz
$ tar zxfv sample_moriyama_data.tar.gz
修改run脚本,改为正确source路径
cd ~/autoware.ai/install/runtime_manager/share/runtime_manager/scripts
vim run
修改对应的bash位置:
${OPTION_COMMAND}="bash -c 'source ~/autoware.ai/install/setup.bash;
修改后,重新编译 install/runtime_manager中run的参数也会随之更改
启动autoware
$ cd ~/autoware.ai
$ source install/setup.bash
$ roslaunch runtime_manager runtime_manager.launch
官方推荐的不同版本的build方式
How to build
For 1.12.0 and Newer
Create a workspace
$ mkdir -p autoware.ai/src
$ cd autoware.ai
Download the workspace configuration for Autoware.AI.
For the 1.12.0 release:
$ wget -O autoware.ai.repos "https://gitlab.com/autowarefoundation/autoware.ai/autoware/raw/1.12.0/autoware.ai.repos?inline=false"
For newer releases, replace 1.12.0 with the version you want to install.
For the master version (bleeding edge):
$ wget -O autoware.ai.repos "https://gitlab.com/autowarefoundation/autoware.ai/autoware/raw/master/autoware.ai.repos?inline=false"
Download Autoware.AI into the workspace.
$ vcs import src < autoware.ai.repos
Install dependencies using rosdep.
$ rosdep update
$ rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
Compile the workspace
With CUDA support
$ AUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
Without CUDA Support
$ colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
For 1.11.1 and Older
Clone the GitHub repository.
$ cd $HOME
$ git clone https://gitlab.com/autowarefoundation/autoware.ai/autoware.git
$ cd autoware
Check out the tag for the appropriate version. To see a list of versions, type git tag.
$ git checkout 1.11.1
$ cd ros
Install dependencies using rosdep.
$ rosdep update
$ rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
Compile the workspace
Version 1.11.0 or 1.11.1 Compile using colcon
$ ./colcon_release
Version 1.10 or older Compile using catkin
$ ./catkin_make_release
Q1 编译velodyne时,无法完成
git clone https://github.com/ros-drivers/velodyne.git
cd velodyne
mkdir build
cd build
cmake ..
make
或者安装
sudo apt-get install ros-melodic-velodyne-pointcloud
随后出现了尴尬的问题 由于Xavier只有16G运行内存和32G eMMc flash 安装导致存储满了 于是购买了ssd
Jetson Xavier之ubuntu安装固态硬盘并挂载到/home目录下
1.查看硬盘所有分区 指令:sudo fdisk -lu 会有一个 /dev/nvme0n1
2.对硬盘进行分区 指令:sudo fdisk /dev/nvme0n1
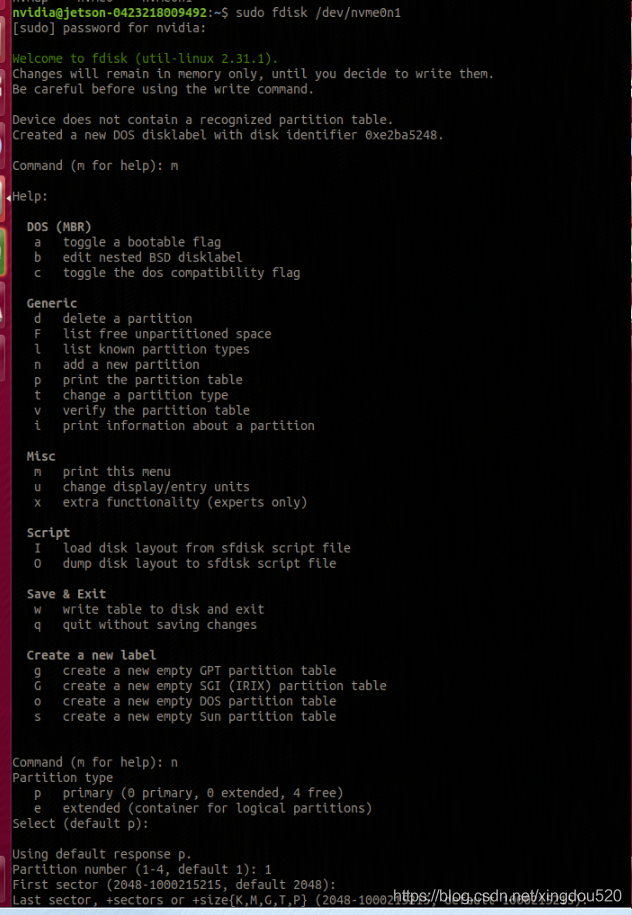
在Command (m for help)提示符后面输入m,可以查看支持的命令。 在Command (m for help)提示符后面输入n,执行 add a new partition 指令给硬盘增加新分区。 Partition type: Select 根据自己的情况 我选择了 primary 主分区。 出现Partition number(1-4)时,输入1表示只分一个区。 后续指定起启柱面(First sector),默认起始地址为 2048,结束地址为:****,不输入数字按ENTER,将填入默认值。 在Command (m for help)提示符后面输入p,打印分区情况,可以看到已正确完成分区。

在Command (m for help)提示符后面输入w,保存分区表。退出。
再次输入指令:sudo fdisk -lu

显示/dev/nvme0n1p1 则表示分区完成 3、格式化分区为ext4 指令:sudo mkfs -t ext4 /dev/nvme0n1p1

4、挂载硬盘分区 先把新硬盘挂在一个临时目录下 cd /mnt/ sudo mkdir home sudo mount /dev/nvme0n1p1 /mnt/home 挂载到/mnt/home df -h 查看

5、替换原home目录 sudo cp -a /home/* /mnt/home/ 把home下的东西拷到挂载的目录下,备份 sudo rm -rf /home/* 把home下的东西删干净 删除后 整个桌面的菜单、任务栏等都没有了 只剩下终端窗口。

sudo umount /dev/nvme0n1p1 卸载硬盘 df -h 查看 卸载成功

6、设置开机挂载 sudo gedit /etc/fstab 末尾增加一行 /dev/nvme0n1p1 /home ext4 defaults 1 2 保存退出 df -h 查看 /home是否被挂载 此时并未被挂在

sudo mount -a 挂载/etc/fstab 中未挂载的分区 df -h 查看

sudo reboot
搞定!!!
完成Autoware中QuickStart的例程
下载数据集:
- 下载3D pointcloud/vector map data
wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_data.tar.gz - 下载ROSBAG data
wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_150324.tar.gz
创建.autoware
$ cd ~
$ mkdir .autoware
$ cd .autoware
$ cp ~/autoware_demo/sample_moriyama_* .
$ tar zxfv sample_moriyama_150324.tar.gz
$ tar zxfv sample_moriyama_data.tar.gz
假设autoware安装在autoware.ai,启动autoware
$ cd ~/autoware.ai
$ source install/setup.bash
$ roslaunch runtime_manager runtime_manager.launch
启动后出现一个管理界面,点击Simulation按钮
再点击ref,选择~/.autoware下选择对应的rosbag包
具体路径:
/home/ubuntu/.autoware/sample_moriyama_150324.bag
启动rviz
在弹出的rviz,选择File -> Open Config
具体路径
~/autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/default.rviz
点击管理界面的Quick Start按钮 具体路径为:
~/autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/
- 加载map输入行后面的ref,选择对应的的luanch文件,my_map.launch
- 加载sensing输入行后面的ref,选择对应的的luanch文件,my_sensing.launch
- 加载localization输入行后面的ref,选择对应的的luanch文件,my_localization.launch
- 加载detection输入行后面的ref,选择对应的的luanch文件,my_detection.launch
- 加载mission_planning输入行后面的ref,选择对应的的luanch文件,my_mission_planning.launch
- 加载motion_planning输入行后面的ref,选择对应的的luanch文件,my_motion_planning.launch
