PID控制及python实现
[toc]
PID:比列(Proportion),积分(Integral),微分(Differential)
PID算法可以用来控制温度,压强,流量,化学成分,速度等等。汽车的定速巡航;伺服驱动器中的速度位置控制;冷却系统的温度;液压系统的压力等都可以通过PID算法实现,很好的保证系统的稳定性。
PID算法的原理
偏差 e:某时刻的系统的输出值(output)和目标值(target)之差
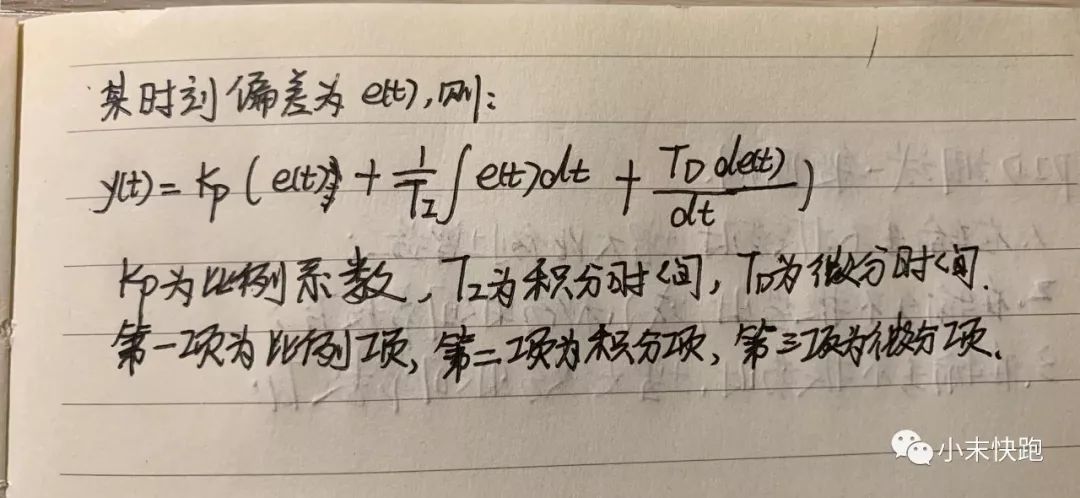
Kp: 比列系数
Ki: 积分系数
Kd: 微分系数
Ti: 积分时间
Td: 微分时间
原理图:
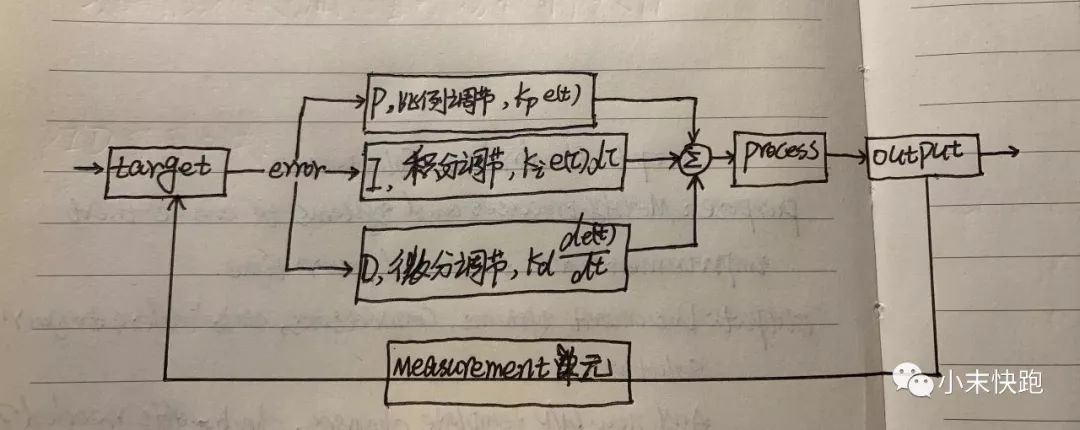
当得到输出后,将输出和输入的差值作为偏差,将这个偏差信号经过比列,积分,微分3种运算方式叠加后再以一定的方式加入到输入中,从而控制最终的结果,达到想要的输出值。
比例系数Kp:
增大比例系数使系统反应灵敏,调节速度加快,并且可以减小稳态误差。但是比例系数过大会使超调量增大,振荡次数增加,调节时间加长,动态性能变坏,比例系数太大甚至会使闭环系统不稳定。
比例控制不能消除稳态误差。
积分系数Ki:
使系统消除稳态误差,提高无差度。积分控制的作用是,只要系统有误差存在,积分调节就进行,积分控制器就不断地积累,输出控制量,直至无差,积分调节停止,积分调节输出一常值。因而,只要有足够的时间,积分控制将能完全消除误差,使系统误差为零,从而消除稳态误差。积分作用的强弱取决于积分时间常数Ti,Ti越小,积分作用就越强,积分作用太强会使系统超调加大,甚至使系统出现振荡,反之Ti大则积分作用弱。加入积分调节可使系统稳定性下降,动态响应变慢。
微分系数Kd:
微分控制可以减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度,减小调整时间,从而改善系统的动态性能。
微分的控制作用跟偏差的变化的速度有关,微分控制能够预测偏差,产生 超前的校正作用,有助于减少超调。
PID的公式原理:
PID需要在计算机上实现,需要将其离散化:
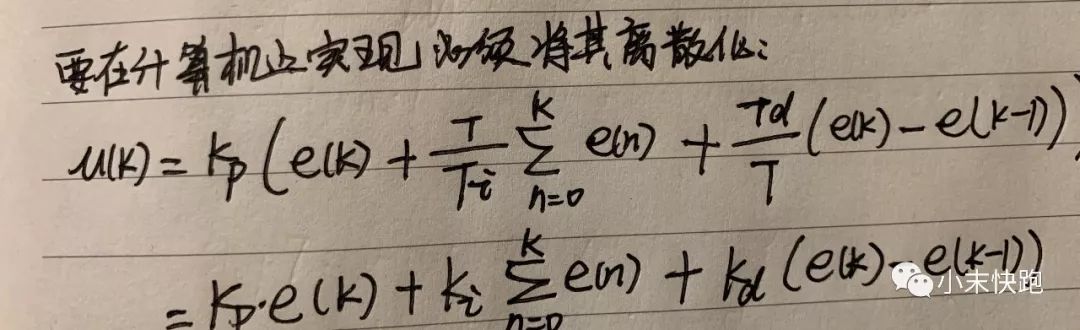
可以看出,某一个偏差的PID值只跟相邻的三个偏差相关.
PID.py
import time
class PID:
def __init__(self, Ppar, Ipar, Dpar):
self.Kp = Ppar
self.Ki = Ipar
self.Kd = Dpar
self.sample_time = 0.00
self.current_time = time.time()
self.last_time = self.current_time
self.SetPoint = 0.0
self.PTerm = 0.0
self.ITerm = 0.0
self.DTerm = 0.0
self.last_error = 0.0
self.int_error = 0
self.output = 0.0
def update(self, feedback_value):
error = self.SetPoint - feedback_value
self.current_time = time.time()
delta_time = self.current_time - self.last_time
delta_error = error - self.last_error
if delta_time >= self.sample_time:
self.PTerm = self.Kp * error
self.ITerm += error * delta_time
self.DTerm = 0.0
if delta_time > 0:
self.DTerm = delta_error / delta_time
self.last_time = self.current_time
self.last_error = error
self.output = self.PTerm + (self.Ki * self.ITerm)
def setSampleTime(self, sample_time):
self.sample_time = sample_time
test_pid.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
'''
@Time : 2022/1/22 1:33 AM
@Author : chenbokai
@File : test_pid.py
'''
import PID
import time
import matplotlib.pyplot as plt
import numpy as np
from scipy.interpolate import make_interp_spline
def test_pid(P,I,D,L):
pid = PID.PID(P,I,D)
pid.SetPoint=1.1
pid.setSampleTime(0.01)
END = L
feedback = 0
feedback_list = []
time_list = []
setpoint_list = []
for i in range(1,END):
pid.update(feedback)
output= pid.output
feedback += output
time.sleep(0.01)
feedback_list.append(feedback)
setpoint_list.append(pid.SetPoint)
time_list.append(i)
time_sm = np.array(time_list)
time_smooth = np.linspace(time_sm.min(), time_sm.max(), 300)
feedback_smooth = make_interp_spline(time_list, feedback_list) (time_smooth)
plt.figure(0)
plt.grid(True)
plt.plot(time_smooth, feedback_smooth, 'b-')
plt.plot(time_list, setpoint_list, 'r')
plt.xlim((0, L))
plt.ylim((min(feedback_list) - 0.5, max(feedback_list) + 0.5))
plt.xlabel('time (s)')
plt.ylabel('PID (PV)')
plt.title('PythonTEST PID--cbk', fontsize=15)
plt.ylim((1 - 0.5, 1 + 0.5))
plt.grid(True)
plt.show()
if __name__ == "__main__":
test_pid(1.2, 1, 0.001, L=100)
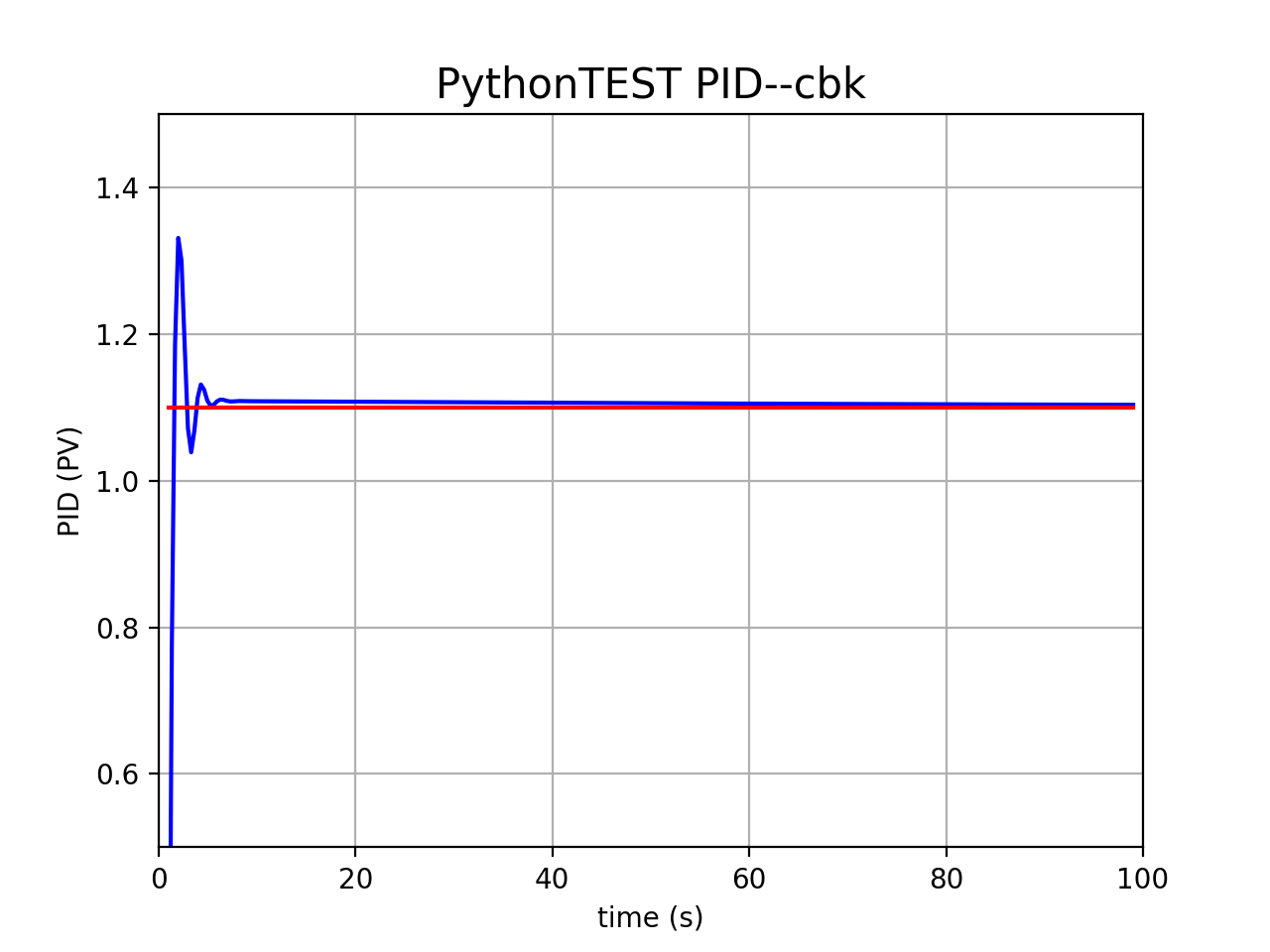
红色线是目标值(setpoint),蓝色线是在当前Kp,Ki,Kd参数下的震荡结果,最终趋于目标值,实现了控制。
PID调试的原则
在输出不震荡时,增大比例增益;
在输出不震荡时,减少积分时间常数;
在输出不震荡时,增大微分时间常数
PID调节口诀
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢,微分时间应加长
理想曲线两个波,前高后低四比一
一看二调多分析,调节质量不会低